Dean's Office
O’Connell Technology Center, Room 410
530-898-5963
ecc@csuchico.edu
Office Hours
8 a.m. – 5 p.m.
Monday – Friday
Mailing Address
College of ECC
400 W. First St.
Chico, CA 95929–0003
Senior Capstone Projects
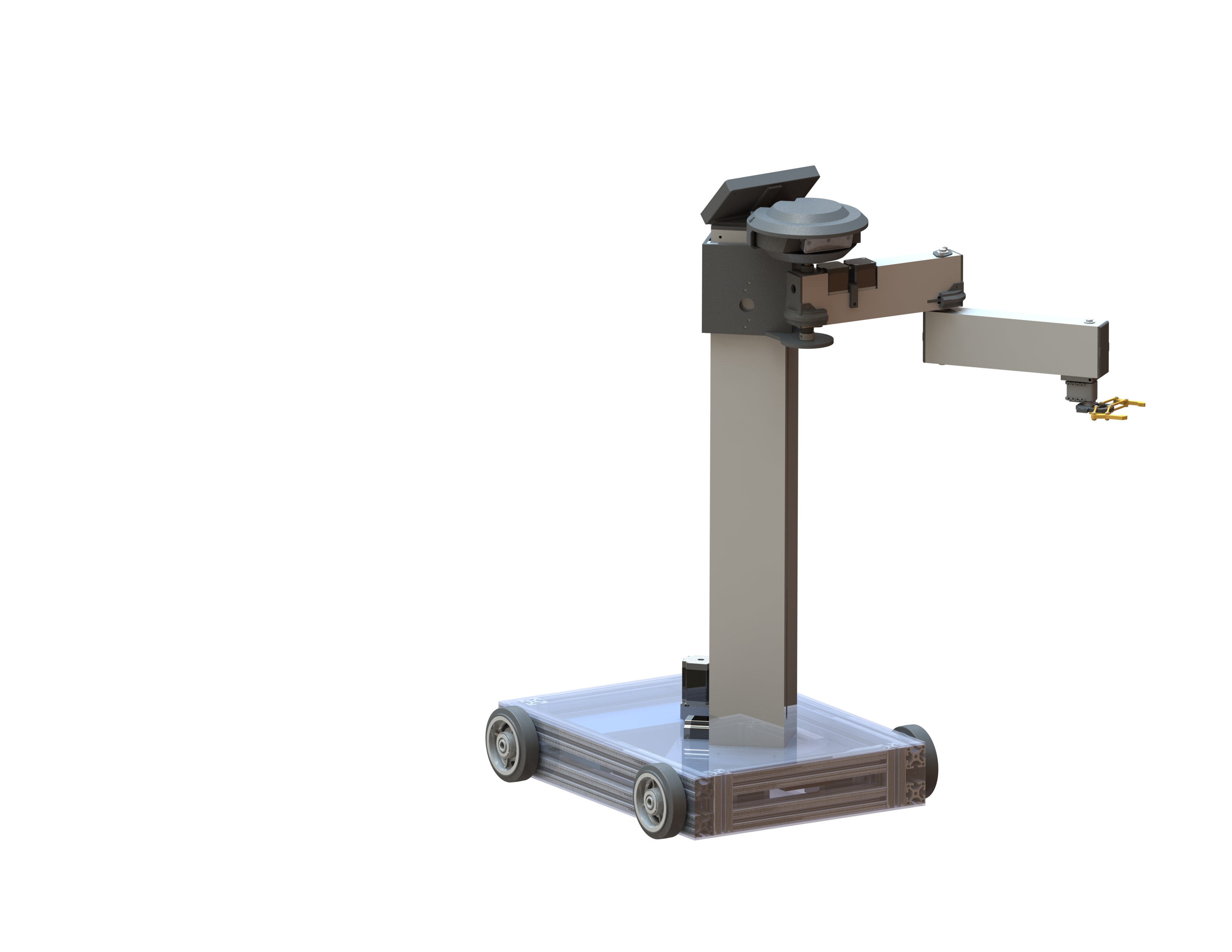
ARM - Automated Robotic Manipulator
Sponsored by Amazon Web Services
Team Members: Erik Dominguez, Abel Flores, Cesar Lopez, Gissel Soto, Jason L Vasquez
Description: The Automated Robotic Manipulator represents a cost-effective solution for automating common household tasks. Most functions of the human upper body are mimicked to some degree with room for future iteration based on user feedback and emerging technologies. The concept was designed with manufacturability, simplicity, and redundancy in mind. All the arm joints are in the xy-plane or yaw direction, which directs most of the stress of the payload to the mechanical joints, rather than back into the motors.